Note
Go to the end to download the full example code.
Segmenting a Map based on transformation of coordinates#
This example demonstrates extracting a region of a particular map based on world coordinates in different systems.
import matplotlib.pyplot as plt
import numpy as np
import astropy.units as u
from astropy.coordinates import SkyCoord
import sunpy.map
from sunpy.coordinates import NorthOffsetFrame
from sunpy.data.sample import AIA_171_IMAGE
We start with the sample data.
smap = sunpy.map.Map(AIA_171_IMAGE)
A utility function gives us access to the helioprojective coordinate of each pixel in this map. From this we then transform the coordinates to the required frame. For this example we are going to extract a region based on the heliographic Stonyhurst coordinates, so we transform to that frame.
all_hpc = sunpy.map.all_coordinates_from_map(smap)
all_hgs = all_hpc.transform_to("heliographic_stonyhurst")
Let’s then segment the data based on coordinates and create a boolean mask
where True indicates invalid or deselected data.
Numpy’s masked arrays allow for a combination of standard numpy array and
a mask array. When an element of the mask is True, the corresponding element
of the associated array is said to be masked (invalid).
For more information about numpy’s masked arrays see numpy.ma.
We now mask out all values not in our coordinate range or where the
coordinates are NaN (because they could not be transformed to the
surface of the Sun).
segment_mask = np.logical_or(all_hgs.lon >= 35 * u.deg, all_hgs.lon <= -35 * u.deg)
segment_mask |= np.isnan(all_hgs.lon)
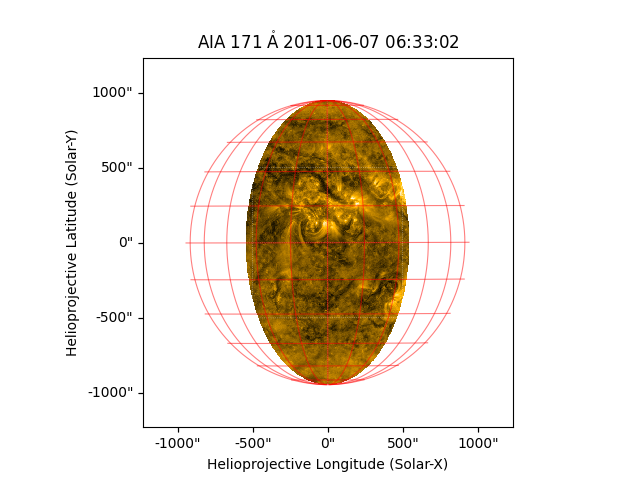
To plot the segment separately, we create a new map with the segment as the mask.
new_frame_map = sunpy.map.Map(smap.data, smap.meta, mask=segment_mask)
fig = plt.figure()
ax = fig.add_subplot(projection=new_frame_map)
new_frame_map.plot(axes=ax)
new_frame_map.draw_grid(axes=ax, color='red')
plt.show()
We can perform various mathematical operations on the extracted segment such as averaging the pixel values or finding the sum of the segment.
masked_data = np.ma.array(new_frame_map.data, mask=new_frame_map.mask)
print(f"Original Map : mean = {smap.data.mean()}, sum = {smap.data.sum()}")
print(f"Segment : mean = {masked_data.mean()}, sum = {masked_data.sum()}")
Original Map : mean = 427.02252197265625, sum = 447765568.0
Segment : mean = 556.6856616925717, sum = 156049568.0
Using sunpy.coordinates.NorthOffsetFrame#
Let us offset the north pole and create the frame.
We then transform coordinates to the offsetted frame and segment the data based on conditions.
all_hpc = sunpy.map.all_coordinates_from_map(smap)
offsetted_coords = all_hpc.transform_to(offset_frame)
segment_mask = np.logical_or(offsetted_coords.lon >= 30 * u.deg,
offsetted_coords.lon <= -20 * u.deg)
Masking out the NaN values of offsetted_coords.lon, we get:
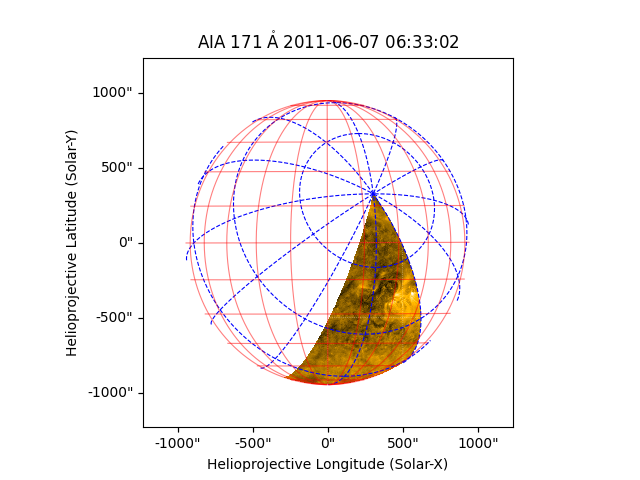
Let’s plot the offsetted segment separately.
offsetted_map = sunpy.map.Map(smap.data, smap.meta, mask=segment_mask)
fig = plt.figure()
ax = fig.add_subplot(projection=smap)
offsetted_map.plot(axes=ax)
overlay = ax.get_coords_overlay(offset_frame)
overlay[0].set_ticks(spacing=30. * u.deg)
overlay.grid(ls='--', color='blue')
offsetted_map.draw_grid(axes=ax, color='red')
plt.show()
We can also find the maximum, minimum or average pixel values of the segment and compare it with the original map.
offset_masked_data = np.ma.array(offsetted_map.data, mask=offsetted_map.mask)
print(f"Original Map : mean = {smap.data.mean()}, "
f"maximum value = {smap.data.max()}, "
f"minimum value = {smap.data.min()}")
print(f"Offset segment : mean = {offset_masked_data.mean()}, "
f"maximum value = {offset_masked_data.max()}, "
f"minimum value = {offset_masked_data.min()}")
Original Map : mean = 427.02252197265625, maximum value = 192130.171875, minimum value = -129.78036499023438
Offset segment : mean = 637.0416340830179, maximum value = 9466.236328125, minimum value = 91.12757110595703
Total running time of the script: (0 minutes 1.625 seconds)